ROSbot 2PRO
ROSbot is a ROS powered 4x4 drive autonomous mobile robot platform equipped with LIDAR, RGB-D camera, IMU, encoders, distance sensors available in three version: "2R" and "2 PRO"
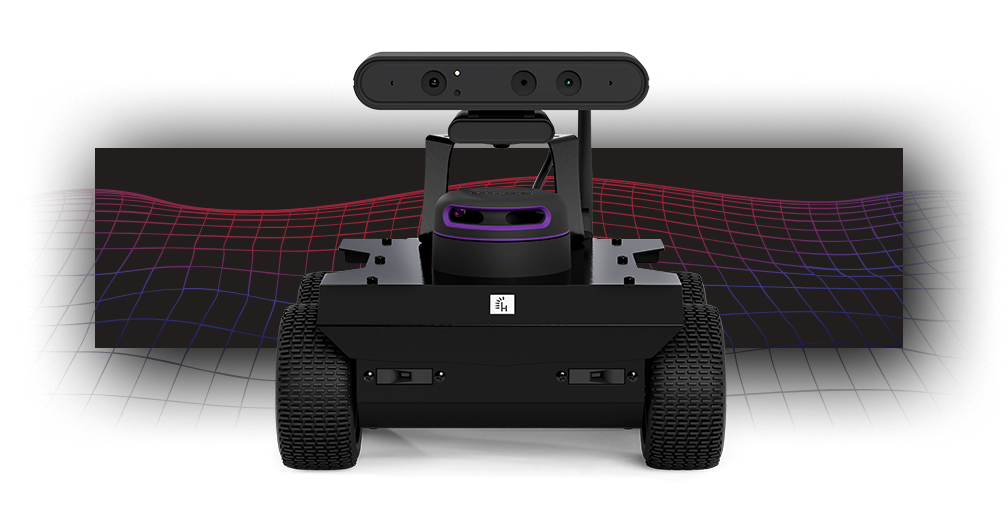
ROSbot 2 PRO
ROSbot 2 PRO is an autonomous, open source mobile robot platform based on ROS and x64 processor. Reinforced with set of tutorials, manuals, simulation models, Docker images and more. It can be used as a learning platform for Robot Operating System as well as a development for a variety of robotic applications such as logistics robots, inspection robots, custom service robots etc.
FEATURES
Aluminium chassis
4 x DC motor drive
SBC: UpBoard - Quad-Core Intel Atom Z8350 1,92 GHz (x64 architecture)
4GB RAM
Alloy wheels
SENSORS&
INTERFACES
RP LIDAR A3
Orbbec Astra RGB-D camera
4 x TOF distance sensors
4 x quadrature encoders
9 DOF IMU
Expansion header (GPIO, USB, HDMI etc.)
Enhancing AMR
development
Our robust, autonomous, mobile robots can be used as a base platform for a variety of AMR (Autonomous Mobile Robots) applications. Building and scaling your project to create real-world solutions is made easy through the use of simulation models, along with an extensive array of tutorials and manuals.
Go-to platform for ROS
education
ROSbot XL, ROSbot 2R / 2 PRO are autonomous, open source robots can be used as a learning platform for Robot Operating System (ROS). ROSbot offers not just the hardware platform itself but a full scope of educational tools such as: development platform, online tools, simulation models and a wide range of dedicated tutorials and manuals which will make the learning process smooth and efficient.